
Martian-Inspired Tripod Walking Robot Generates Its Own Gaits
hen Yoichi Masuda set out to design a new legged robot, he found inspiration in the Martian Tripods from the classic sci-fi novel “The War of the Worlds” by H.G. Wells. A three-legged configuration seems to offer some advantages when it comes to walking and balancing, and Masuda became curious about the absence of three-legged animals in nature. Are there evolutionary factors that explain why we haven’t seen any? And if three-legged creatures existed, could there be a universal principle of walking locomotion, common for bipeds, tripeds, and quadrupeds? To explore those questions, Masuda and his colleagues at Osaka University built a three-legged robot named Martian.
Why exactly there aren’t any tripedal creatures is an interesting question. There are a few animals (like the kangaroo and the tripod fish, which totally exists) that are sort of tripedal, in that they use two limbs and a tail for mobility. However, both of these animals exhibit bilateral symmetry, meaning that their left half is a mirror image of their right half. The vast majority of animals are symmetrical like this, although there are interesting (and very minor and specific) exceptions including crossbills, owls, some crabs, a few sorts of whales, and of course the mighty honey badger, which has one extra tooth on the left side. There are also organisms with radial and spherical symmetry.
But all this doesn’t really answer the question of what’s wrong with trilateral symmetry: Were the Martians and their Tripod machines in “War of the Worlds” on to something, or is there some fundamental reason why tripedal locomotion isn’t as efficient or useful as bipedal or quadrupedal locomotion?
A decade ago, Dennis Hong and his team at RoMeLa developed a tripedal robot called STriDER, the Self-excited Tripedal Dynamic Experimental Robot, which they used to test a variety of tripedal gaits. The experiments showed that STriDER was able to walk, but like most tripedal robots that we’ve seen, it was more like an intermittent biped, primarily using two of its three limbs at a time.
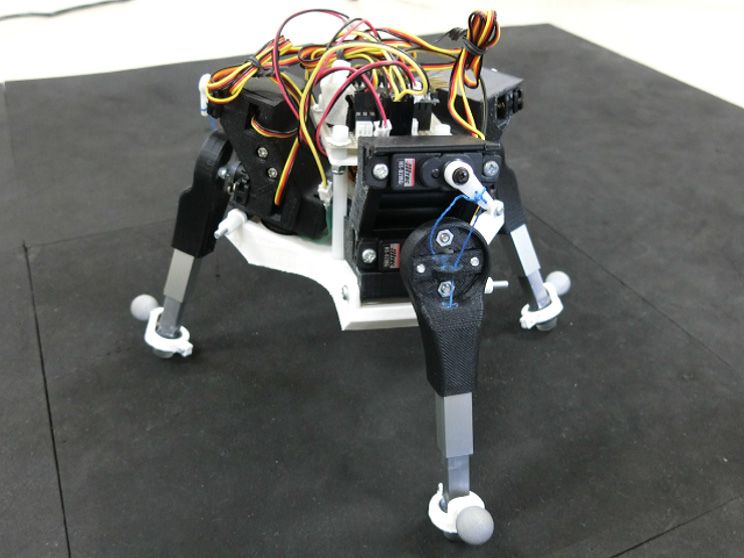
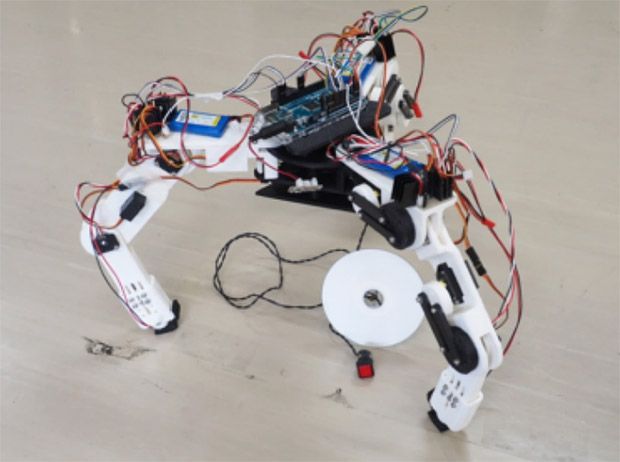
Yoichi Masuda’s tripedal design is different in that regard. His robot has not only trilateral symmetry but a trilateral gait as well. In other words, the three legs are each moving in a similar way, except they are out of phase:
This robot, Martian Petit, has three highly compliant leg modules, and is able to move in circles as well as in a line without any one leg knowing what the other legs are doing, as the researchers explain in a recent paper:
The control scheme . . . consists of a phase oscillator and sensory feedback of reaction force from the ground, where the control law for each leg is decoupled from the others (i.e., it has no explicit feedback of the other legs’ information). We show that rotary and forwarding locomotion successfully emerge using the control method, depending on the choice of frequency ratio of the oscillators.
The kind of decentralized approach described here has already been successfully applied to other kinds of biomimetic robots, and different kinds of stable gaits can emerge autonomously. It’s no different with the tripod robot: Depending on what oscillation frequency is selected, the robot can be made to either rotate or move in a single direction, without having that specific gait programmed into it. The researchers are hoping that as they continue working on their robot, it’ll provide some answers about how animals have evolved to move the way they do, and perhaps why none of them have three legs.
While this is the third generation of Martian robot the Osaka University researchers have built, it was intentionally designed with very simple dynamics to make it easier to approach the gait generation problem. The researchers, led by Masato Ishikawa, a professor of mechanical engineering at Osaka University, are already working on a new version with a few extra degrees of freedom (and consequently more complex dynamics) in the legs.


Post a Comment